# Enviroments
| Name | Linear | Nonlinear | State Size | Input size |
|:----------|:---------------:|:----------------:|:----------------:|:----------------:|
| First Order Lag System | ✓ | x | 4 | 2 |
| Two wheeled System (Constant Goal) | x | ✓ | 3 | 2 |
| Two wheeled System (Moving Goal) (Coming soon) | x | ✓ | 3 | 2 |
| Cartpole (Swing up) | x | ✓ | 4 | 1 |
## FistOrderLagEnv
System equations.
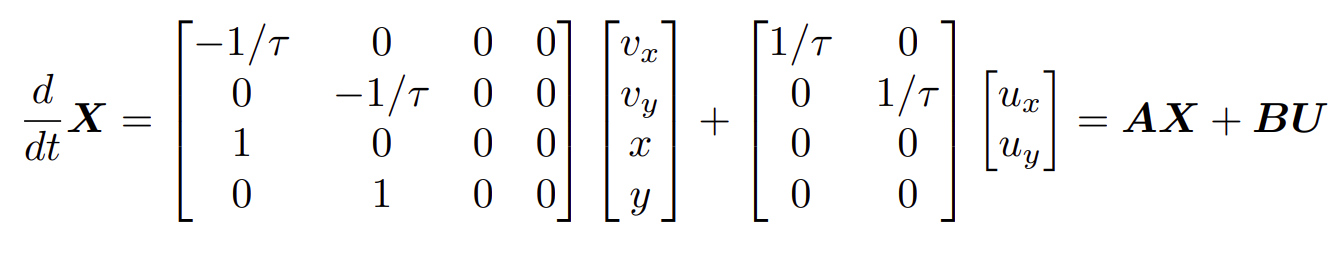 You can set arbinatry time constant, tau. The default is 0.63 s
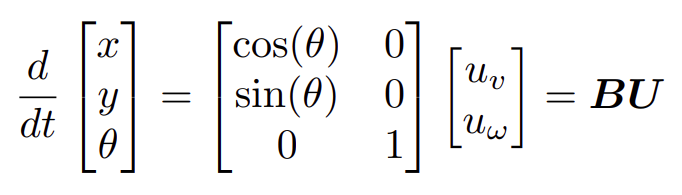
## TwoWheeledEnv
System equations.
You can set arbinatry time constant, tau. The default is 0.63 s
## TwoWheeledEnv
System equations.
 ## CatpoleEnv (Swing up)
System equations.
## CatpoleEnv (Swing up)
System equations.
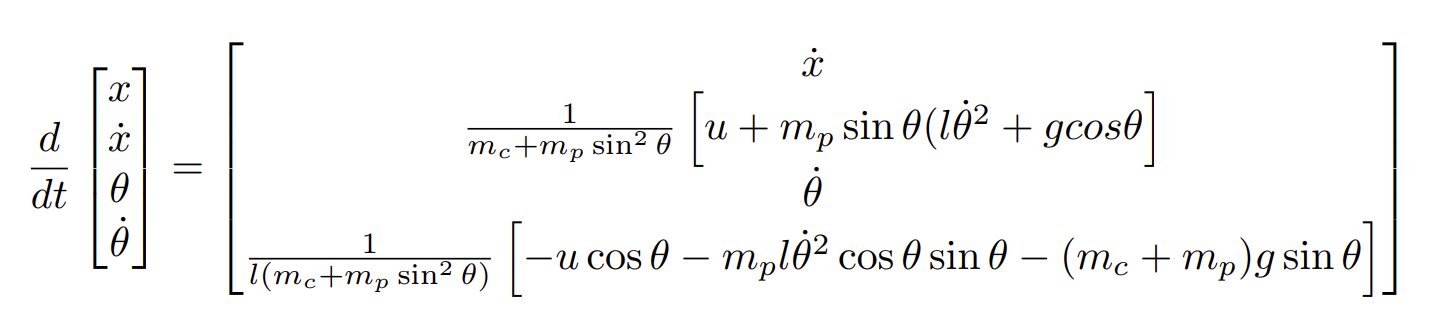 You can set arbinatry parameters, mc, mp, l and g.
Default settings are as follows:
mc = 1, mp = 0.2, l = 0.5, g = 9.8
You can set arbinatry parameters, mc, mp, l and g.
Default settings are as follows:
mc = 1, mp = 0.2, l = 0.5, g = 9.8