|
|
||
|---|---|---|
| docs | ||
| .gitignore | ||
| README.md | ||
| Snipaste_2024-06-22_21-30-43.png | ||
| agent.py | ||
| control.py | ||
| main.py | ||
| requirements.txt | ||
| test.py | ||
| utils.py | ||
| vision.py | ||
{kind=link}
README.md
USVLander
项目介绍
USVLander 是一个完全基于计算机视觉的无人机控制算法,目前针对 DJI Tello 无人机设计,能够实现视觉自主降落至无人船。该项目基于 Python 编程语言,并集成了 YOLO 实时目标检测系统和 OpenCV 计算机视觉库,以提供精确的导航和控制。
安装说明
要安装 USVLander,您需要确保您的系统中已安装 Python 3.10 或更高版本(开发过程基于 Python3.10.8 )。此外,您还需要安装 YOLO 和 OpenCV 库。可以通过以下命令安装所需的依赖项:
pip install -r requirements.txt
如何使用
在安装所有必要的依赖项后,您可以通过以下步骤使用 USVLander 控制算法:
- 将计算机连接到 DJI Tello 无人机的 Wi-Fi 热点。(一般为 Tello-XXXXXX)。
- 打开终端并导航到 USVLander 项目目录。
- 运行主控制脚本:
python agent.py
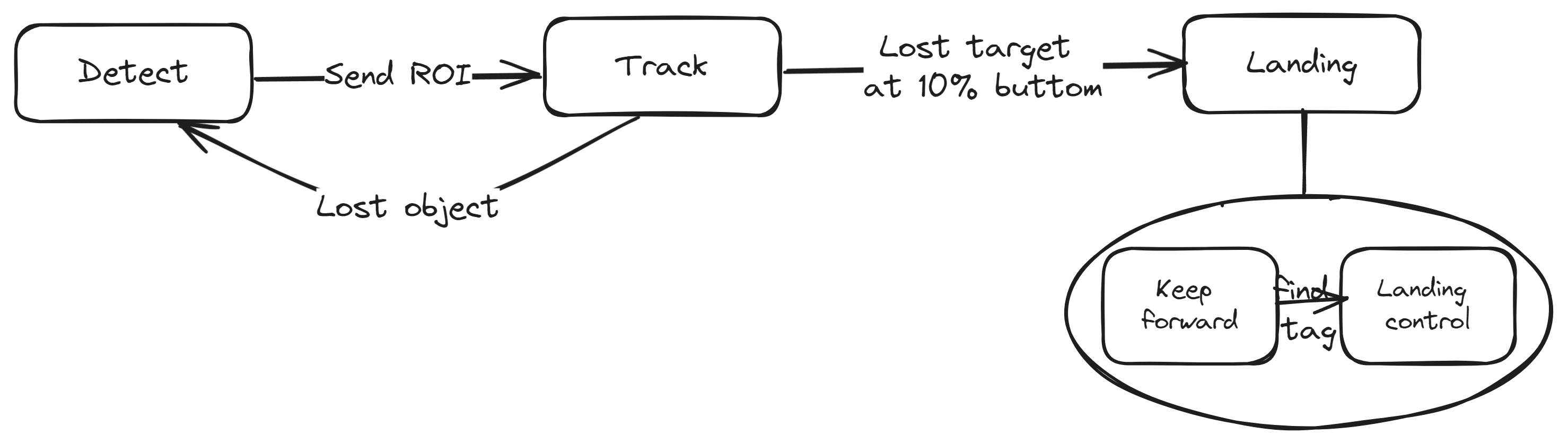
程序启动后,无人机将在延迟 5 秒后起飞,上升至距地面 2 m,然后开始搜索无人船。在开发阶段,基于 YOLO 的目标检测并未实装,因此需要使用“人工智能”,由操作者手动在弹出的 ROI Select 窗口中选择无人船的位置,并使用 空格键确认。选择完成后,程序将自动计算无人机与无人船之间的距离,并对无人船的追踪。
在无人机底部摄像头检测到无人船上的 Apriltag 后,无人机将开始降落。在降落过程中,无人机将尝试保持在无人船正上方,并在降落过程中调整自身位置,以确保安全降落。
License
USVLander 根据 MIT 许可证发布。这意味着您可以自由地使用、修改和分发该软件,但您必须包含原始作者的版权声明和许可声明。
请注意,此 README 是一个基本模板,您可能需要根据项目的具体情况进行调整。确保在发布之前,您已经完全测试了所有的功能,并且代码的文档是最新的。