4.8 KiB
CGMRES method of Nonlinear Model Predictive Control
This program is about Continuous gmres method for NMPC Although usually we have to calculate the partial differential of optimal matrix, it could be really complicated. By using CGMRES, we can pass the calculating step and get the optimal input quickly.
Problem Formulation
-
example
-
model
- evaluation function
-
two wheeled model
-
model
- evaluation function
if you want to see more detail about this methods, you should go https://qiita.com/MENDY/items/4108190a579395053924. However, it is written in Japanese
Expected Results
- example

-
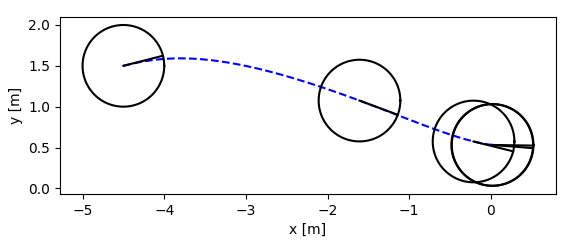
two wheeled model
-
trajectory
- time history


Usage
- for example
$ python main_example.py
- for two wheeled
$ python main_two_wheeled.py
Requirement
- python3.5 or more
- numpy
- matplotlib
Reference
I`m sorry that main references are written in Japanese
-
main (commentary article) (Japanse) https://qiita.com/MENDY/items/4108190a579395053924
-
Ohtsuka, T., & Fujii, H. A. (1997). Real-time Optimization Algorithm for Nonlinear Receding-horizon Control. Automatica, 33(6), 1147–1154. https://doi.org/10.1016/S0005-1098(97)00005-8
-
非線形最適制御入門(コロナ社)
-
実時間最適化による制御の実応用(コロナ社)